Mechanics: Elasticity and Inelasticity
- ME 340 (Wei Cai): elasticity, plasticity, fracture.
- I: 2D \(\phi\), 3D \(G\), contact; II: yield, flow, hardening; III: LEFM, \(J\), fatigue.
- Analytic + Matlab.
- Barber (2010); Anderson (2005).
- consolidated study notes.
Symbols: \(\phi\): Airy stress function (2D); \(G\): Green's function (3D); LEFM: linear elastic fracture mechanics; \(J\): path-independent contour integral.
Elasticity
\(\sigma,\ \mathbf{u}\)
Plasticity
\(\varepsilon^{p},\ f=0\)
Fracture
\(K_{I},\ J\)
Core idea: well-posed BVP \(\rightarrow\) elastic solution \(\rightarrow\) plasticity if \(f > 0\) \(\rightarrow\) fracture if cracks grow.
Symbols: \(\boldsymbol{\sigma}\): Cauchy stress tensor; \(\mathbf{u}\): displacement field; \(\varepsilon^{p}\): plastic strain; \(f\): yield function (\(f\le 0\) elastic); \(K_I\): mode-I stress intensity factor; \(J\): \(J\)-integral (fracture).
Tensors and Einstein notation
Foundations
One-dimensional and rod problems
Two-dimensional elasticity
Three-dimensional elasticity
Plasticity
Fracture mechanics
Problem-solving workflow
Use ← → keys, swipe, or scroll to navigate.
- Scalars (one number): \(E\), \(\nu\), \(\rho\). Vectors \(\mathbf{a}\): components \(a_i\). Tensors \(\mathbf{T}\): components \(T_{ij}\) (and higher order).
- Einstein summation: repeated indices are summed, e.g. \(a_i b_i = a_1 b_1 + a_2 b_2 + a_3 b_3\); \(\sigma_{ii}=\sigma_{xx}+\sigma_{yy}+\sigma_{zz}\).
- Comma notation: \(u_{i,j}=\partial u_i/\partial x_j\); \(\sigma_{ij,j}=\partial\sigma_{ij}/\partial x_j\) (sum on \(j\)).
- Kronecker delta \(\delta_{ij}=1\) if \(i=j\), else \(0\). Levi-Civita \(\varepsilon_{ijk}\) for cross products / determinants.
- Bold symbols (\(\boldsymbol{\sigma}\), \(\mathbf{u}\)) denote tensors/vectors; indicial form (\(\sigma_{ij}\), \(u_i\)) is equivalent.
Symbols: \(i,j,k\in\{1,2,3\}\): Cartesian indices (\(x_1,x_2,x_3\)); \(\delta_{ij}\): Kronecker delta; \(T_{ij}\): second-order tensor components; \(C_{ijkl}\): fourth-order stiffness components.
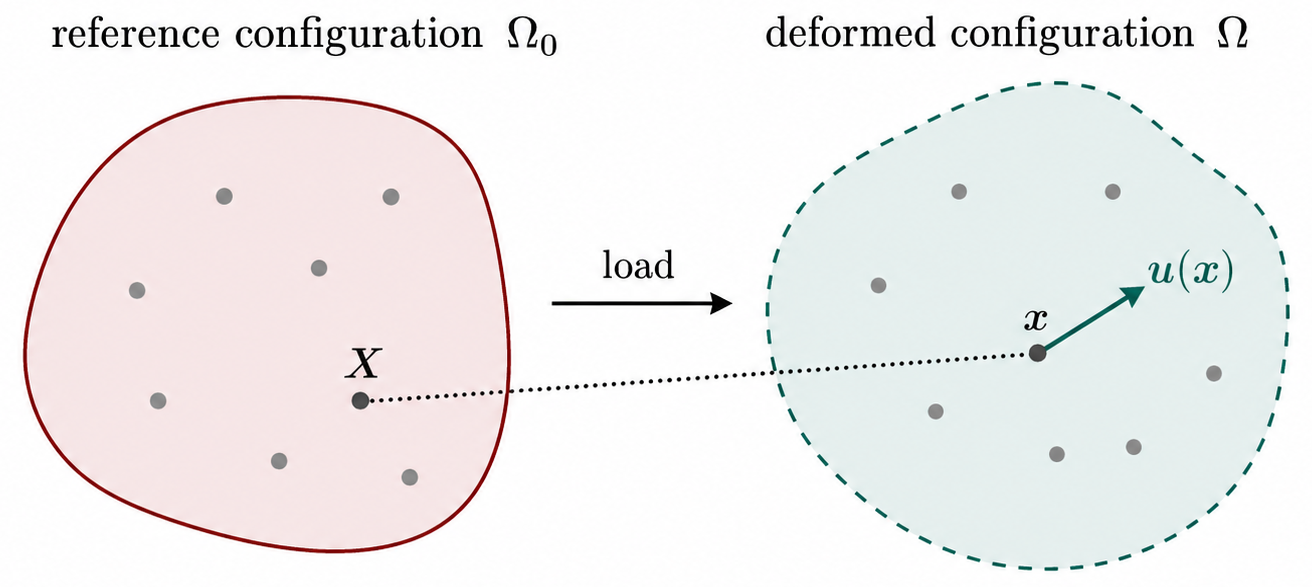
- Reference \(\Omega_0\) \(\rightarrow\) deformed \(\Omega\) under load.
- \(\mathbf{X}\mapsto\mathbf{x}=\mathbf{X}+\mathbf{u}(\mathbf{X})\); displacement \(\mathbf{u}(\mathbf{x})\).
- Small strain: \(\varepsilon_{ij} = \tfrac{1}{2}(u_{i,j} + u_{j,i})\).
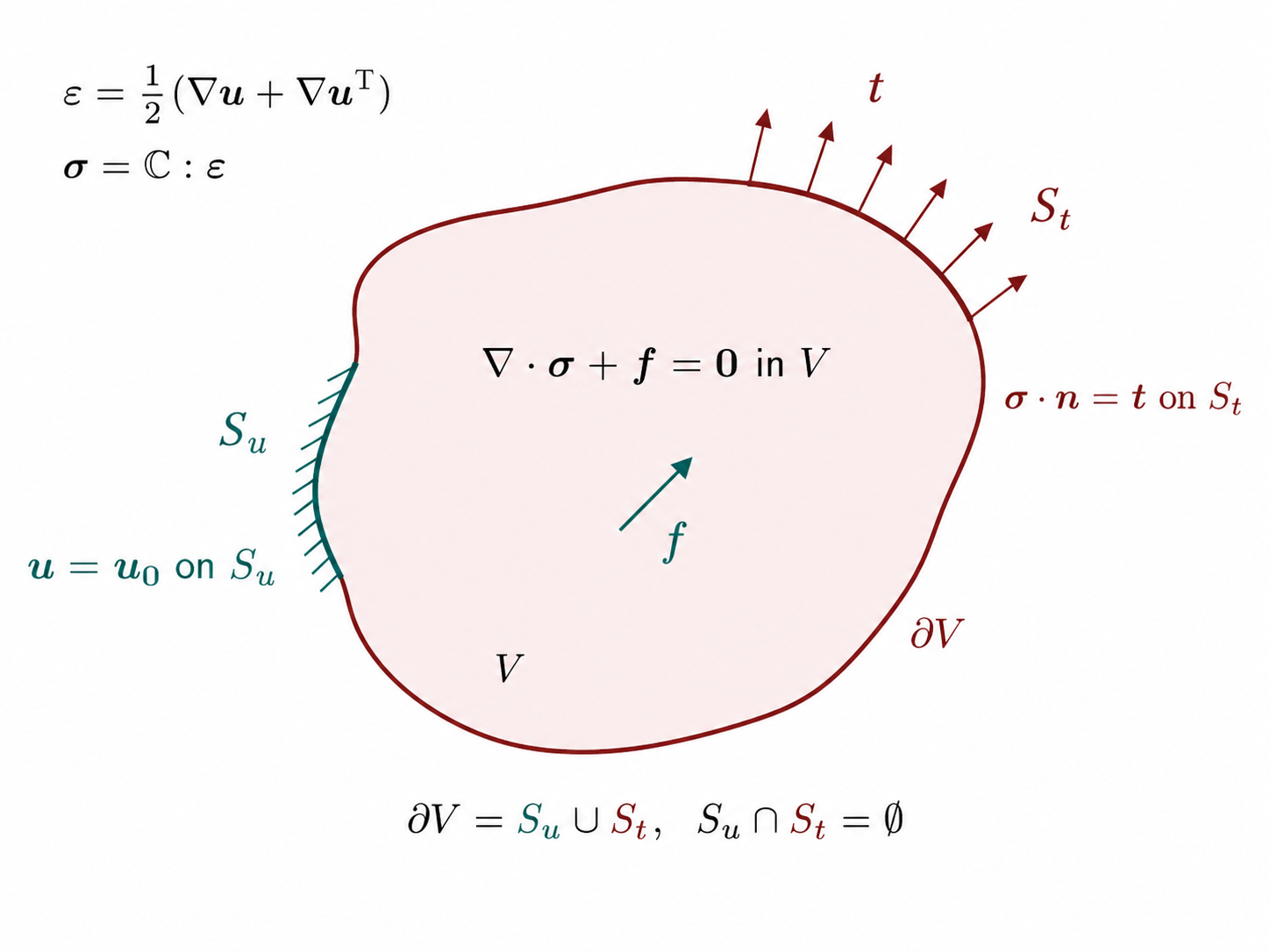
- Body \(V\) with boundary \(\partial V=S_u\cup S_t\).
Symbols: \(\Omega_0,\Omega\): reference / deformed material domains; \(\mathbf{X},\mathbf{x}\): material / spatial position vectors; \(\mathbf{u}\): displacement (\(\mathbf{x}=\mathbf{X}+\mathbf{u}\)); \(\varepsilon_{ij}\): infinitesimal strain tensor; \(V,\partial V\): body and its boundary; \(S_u,S_t\): displacement / traction boundary segments.
\[ \sigma_{ij}=\sigma_{ji},\qquad \varepsilon_{ij}=\tfrac{1}{2}\!\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right). \]
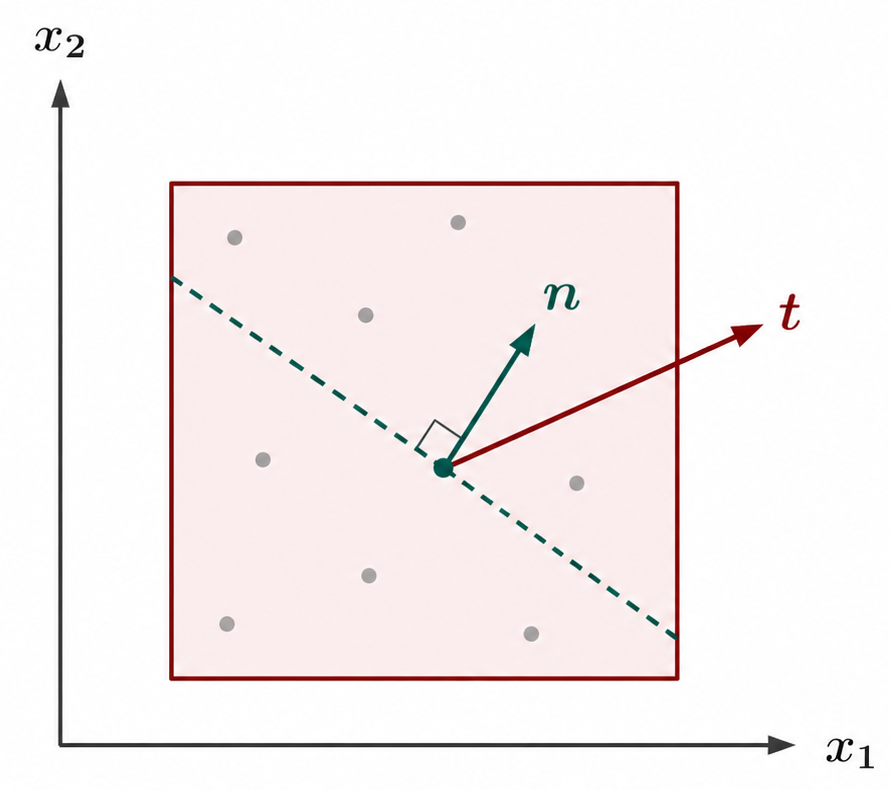
- Cauchy stress \(\boldsymbol{\sigma}\); traction \(\mathbf{t}=\boldsymbol{\sigma}\cdot\mathbf{n}\), \(t_i=\sigma_{ij}n_j\).
- Equilibrium (no body force): \(\partial\sigma_{ij}/\partial x_j = 0\).
Symbols: \(\sigma_{ij}\): Cauchy stress (symmetric); \(\varepsilon_{ij}\): small-strain tensor; \(u_i\): displacement components; \(\mathbf{t},t_i\): traction vector / components; \(n_j\): outward unit normal on a surface.
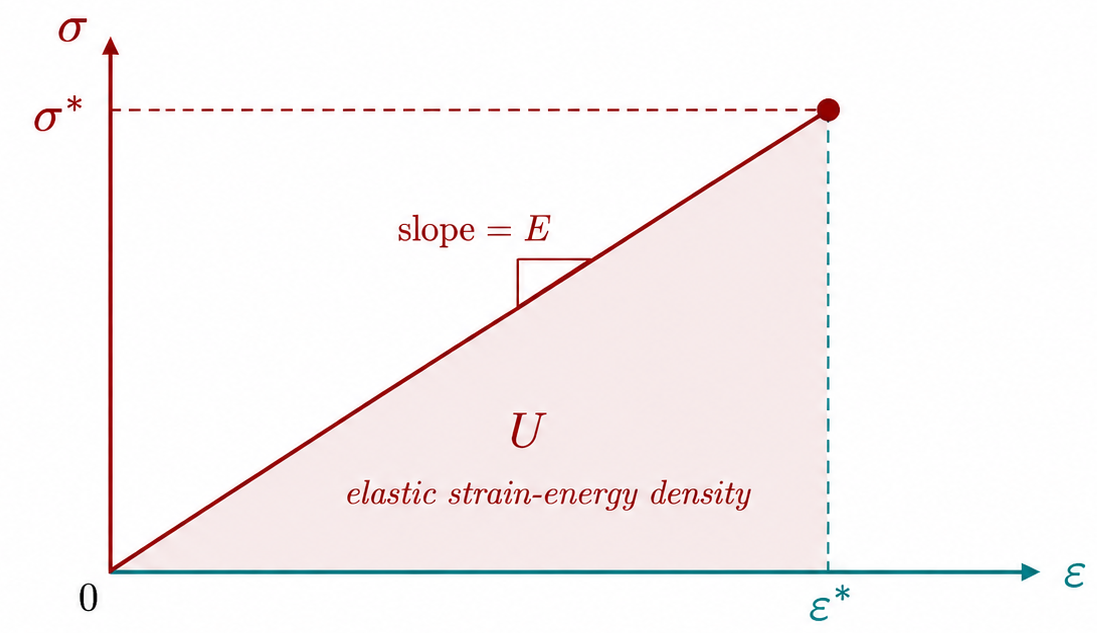
\[ \sigma_{ij}=C_{ijkl}\,\varepsilon_{kl}, \qquad \sigma = E\varepsilon\ \text{(1D)},\qquad u=\tfrac{1}{2}\sigma\varepsilon. \]
- Isotropic: \(\varepsilon_{ij} = \tfrac{1+\nu}{E}\sigma_{ij} - \tfrac{\nu}{E}\sigma_{kk}\delta_{ij}\).
- Shaded area under \(\sigma\)–\(\varepsilon\) curve = strain-energy density \(u\) at \((\varepsilon^*,\sigma^*)\).
Symbols: \(C_{ijkl}\): elasticity tensor (Hooke's law); \(E\): Young's modulus; \(\nu\): Poisson's ratio; \(u\): strain-energy density per unit volume; \(\sigma_{kk}\): trace of stress (\(\sigma_{xx}+\sigma_{yy}+\sigma_{zz}\)); \(\delta_{ij}\): Kronecker delta.
\[ \boldsymbol{\varepsilon}=\tfrac{1}{2}(\nabla\mathbf{u}+\nabla\mathbf{u}^{\top}),\quad \boldsymbol{\sigma}=\mathbb{C}:\boldsymbol{\varepsilon},\quad \nabla\!\cdot\!\boldsymbol{\sigma}+\mathbf{f}=\mathbf{0}\ \text{in }V. \]
\[ \mathbf{u}=\mathbf{u}_0\ \text{on }S_u,\qquad \boldsymbol{\sigma}\cdot\mathbf{n}=\mathbf{t}\ \text{on }S_t,\qquad \partial V=S_u\cup S_t. \]
Symbols: \(\mathbb{C}\): fourth-order elastic stiffness tensor; \(\mathbf{f}\): body-force vector per unit volume; \(\mathbf{u}_0\): prescribed displacement on \(S_u\); \(\mathbf{t}\): prescribed traction on \(S_t\); \(\mathbf{n}\): outward unit normal; \(\nabla,\cdot\): gradient / divergence.
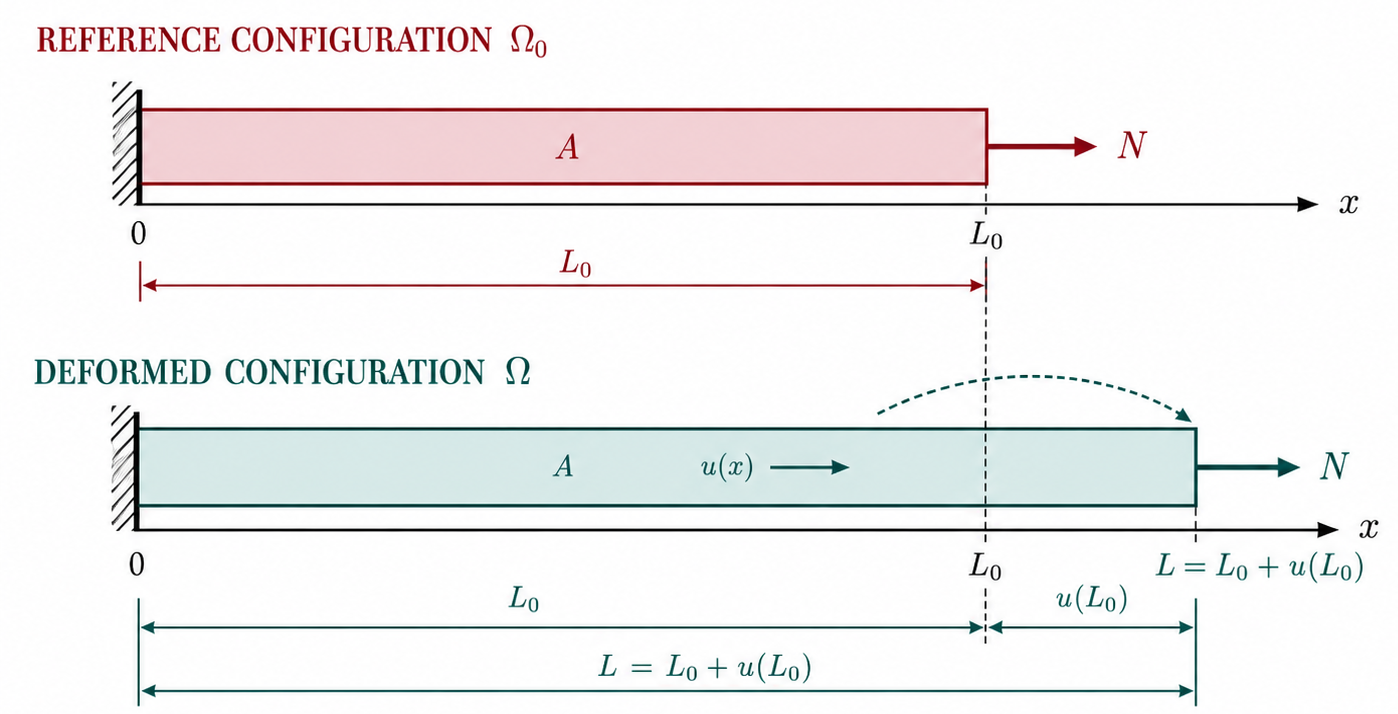
\[ \varepsilon=\frac{\mathrm{d} u}{\mathrm{d} x},\qquad N=EA\,\varepsilon,\qquad \frac{\mathrm{d} N}{\mathrm{d} x}+f=0. \]
- Reference length \(L_0\); deformed \(L=L_0+u(L_0)\); fixed at \(x=0\), load \(N\) at \(x=L_0\).
- Cross-section \(A\); rigidity \(EA\); same BVP pattern as 3D.
Symbols: \(\varepsilon\): axial strain; \(u(x)\): axial displacement; \(N\): axial normal force; \(EA\): axial rigidity (stiffness \(\times\) area); \(f\): distributed axial body force per unit length; \(L_0,A\): reference length and cross-sectional area.
Airy stress function \(\phi(x,y)\), \(\nabla^4\phi=0\):
\[ \sigma_{xx}=\phi_{,yy},\qquad \sigma_{yy}=\phi_{,xx},\qquad \sigma_{xy}=-\phi_{,xy}. \]
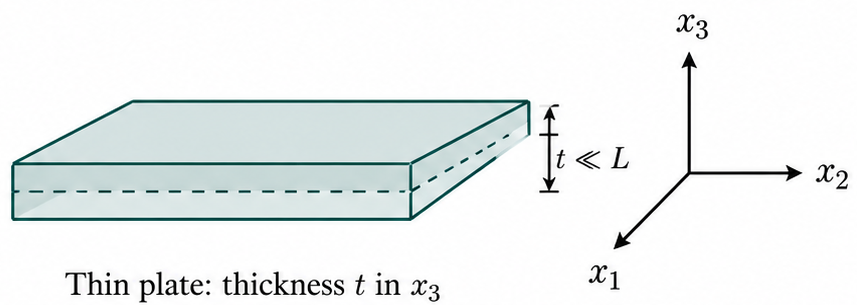
Plane stress (\(t\ll L\)): \(\sigma_{33}=\sigma_{13}=\sigma_{23}=0\)
\[ \varepsilon_{xx}=\tfrac{1}{E}(\sigma_{xx}-\nu\sigma_{yy}) \]
\[ \varepsilon_{yy}=\tfrac{1}{E}(\sigma_{yy}-\nu\sigma_{xx}) \]
\[ \varepsilon_{xy}=\tfrac{1+\nu}{E}\sigma_{xy} \]
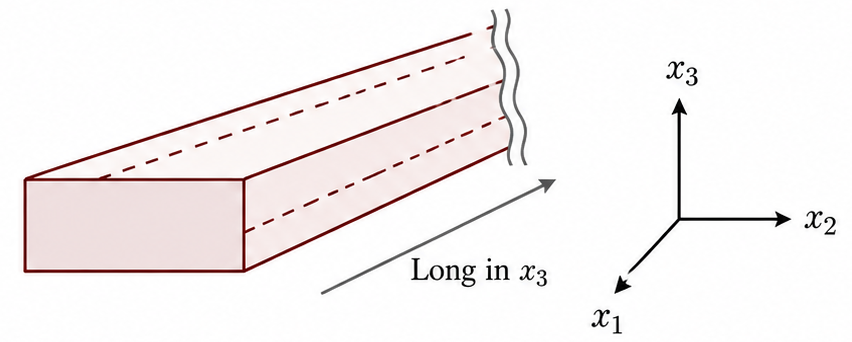
Plane strain (long in \(x_3\)): \(\varepsilon_{33}=\varepsilon_{13}=\varepsilon_{23}=0\)
\[ \sigma_{xx}=\lambda(\varepsilon_{xx}+\varepsilon_{yy})+2\mu\varepsilon_{xx} \]
\[ \sigma_{yy}=\lambda(\varepsilon_{xx}+\varepsilon_{yy})+2\mu\varepsilon_{yy} \]
\[ \sigma_{xy}=2\mu\varepsilon_{xy} \]
\(\lambda=\tfrac{E\nu}{(1+\nu)(1-2\nu)}\), \(\mu=\tfrac{E}{2(1+\nu)}\)
Symbols: \(\phi\): Airy stress function; \(\lambda,\mu\): Lamé constants; \(E,\nu\): Young's modulus and Poisson's ratio; \(t,L\): plate thickness and in-plane length scale.
Four recurring routes for \(\nabla^4\phi=0\) with different geometry / BCs:
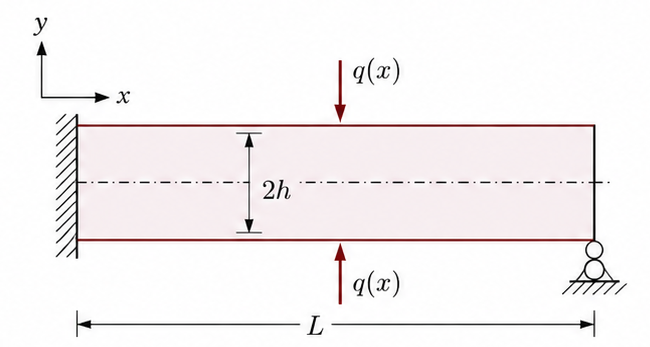
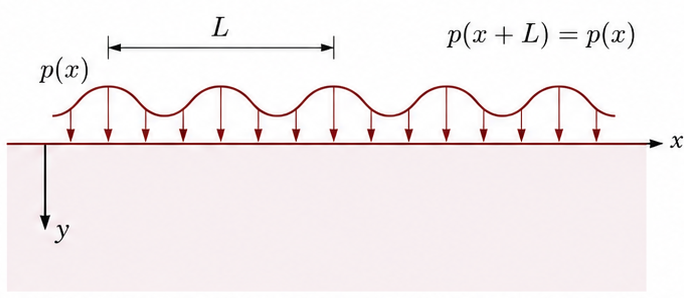
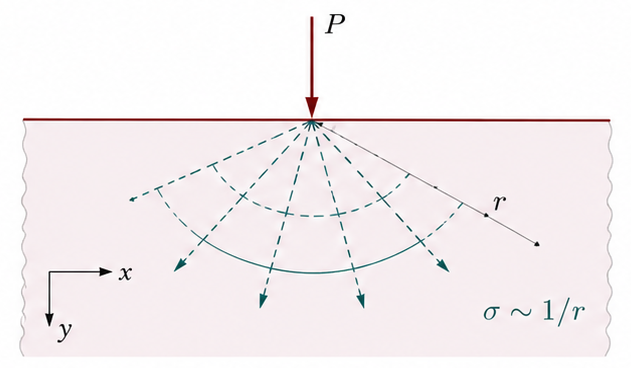
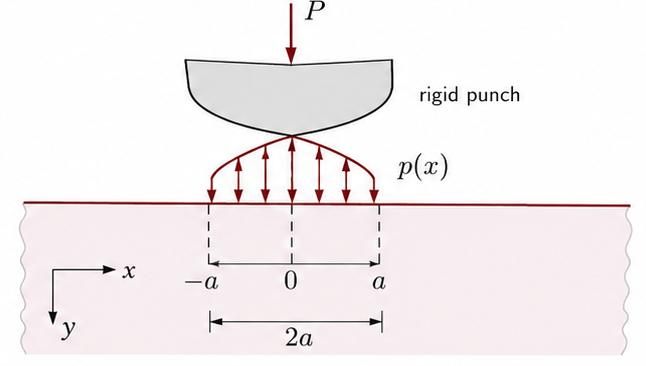
Symbols: \(q(x)\): transverse distributed load on a beam; \(L,2h\): beam span and total depth; \(p(x)\): periodic surface pressure; \(P\): concentrated line load; \(r\): radial distance from a load; \(a\): half-width of contact zone.
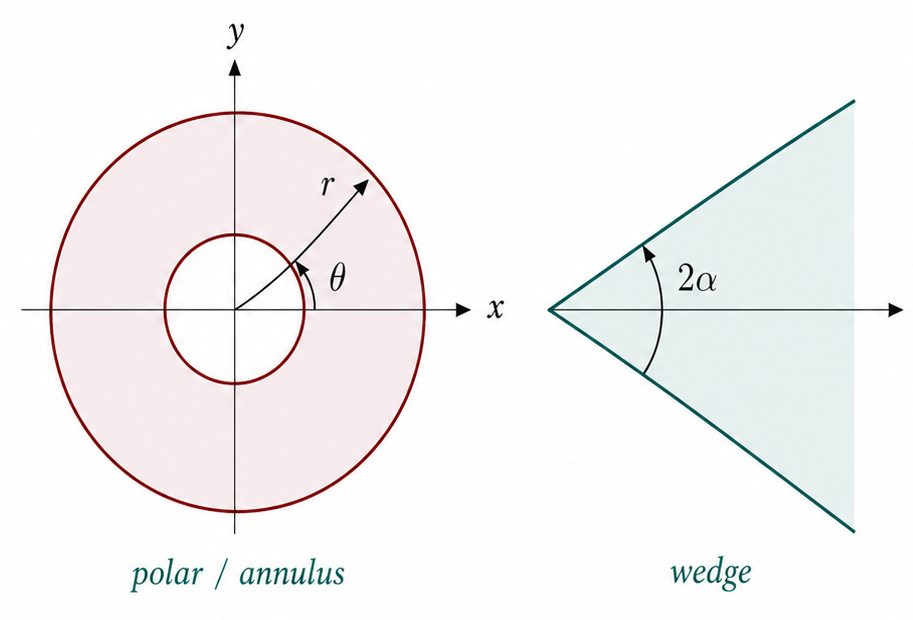
\[ \nabla^4\phi=0 \ \Rightarrow\ \phi(r,\theta)\ \text{with}\ r,\theta,\ln r,\ \theta\ln r\ \text{modes}. \]
- Lec. 11–12: annulus / hole; Lec. 13: wedge angle \(2\alpha\), corner modes.
- Pick modes with symmetry and finite energy.
Symbols: \(r,\theta\): polar coordinates; \(\phi(r,\theta)\): Airy function in polar form; \(2\alpha\): wedge opening angle; \(\ln r,\ \theta\ln r\): typical singular / logarithmic modes.
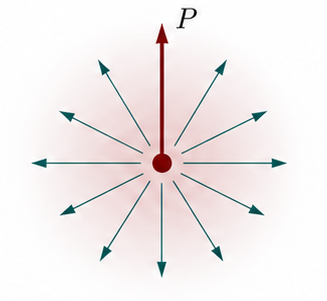
\[ \nabla\!\cdot\!\boldsymbol{\sigma}+\mathbf{f}=\mathbf{0},\quad \mathbf{u}(\mathbf{x})=\int G(\mathbf{x},\boldsymbol{\xi})\,\mathbf{f}(\boldsymbol{\xi})\,\mathrm{d}V_\xi. \]
- Kelvin (Lec. 17): point force \(\mathbf{P}\) in infinite space.
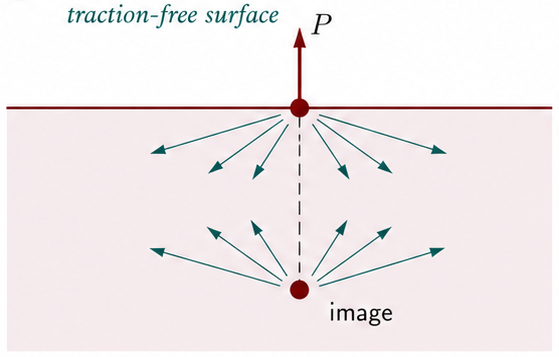
- Image (Lec. 16): traction-free surface via mirror force.
Symbols: \(G(\mathbf{x},\boldsymbol{\xi})\): Green's function (displacement kernel); \(\mathbf{x},\boldsymbol{\xi}\): field / source points; \(\mathrm{d}V_\xi\): volume element at \(\boldsymbol{\xi}\); \(\mathbf{P}\): concentrated point force; \(\mathbf{f}\): body-force density.
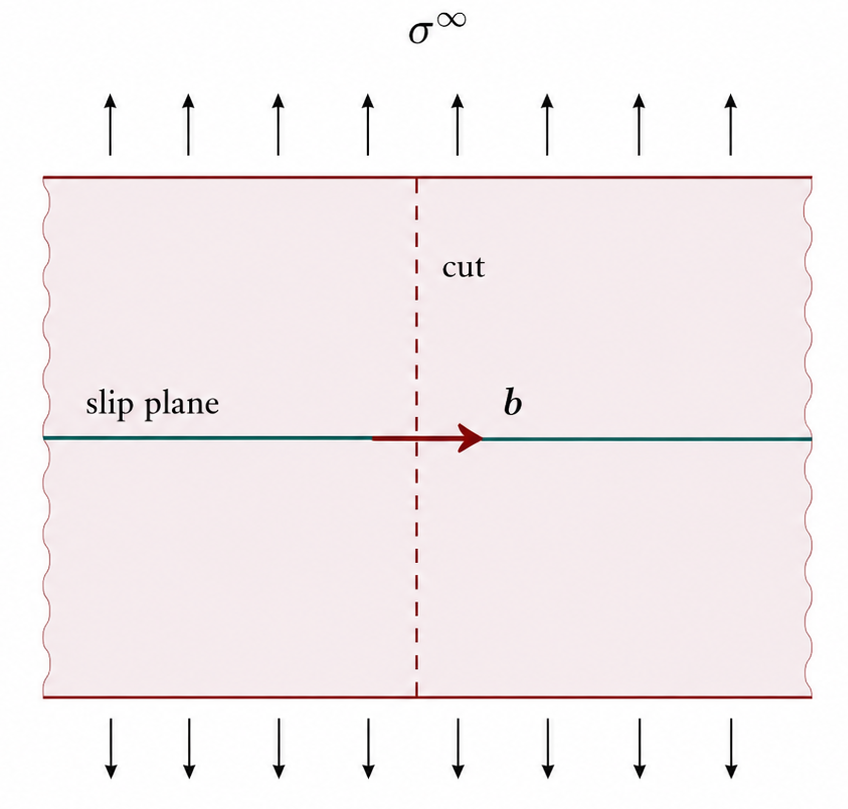
- Volterra cut; Burgers vector \(\mathbf{b}\) across slip plane.
- Far field: remote \(\boldsymbol{\sigma}^{\infty}\); Peach–Köhler force on dislocation.
- Singular core + image / boundary correction; many dislocations \(\Rightarrow\) \(\varepsilon^{p}\).
Symbols: \(\mathbf{b}\): Burgers vector (slip discontinuity); \(\boldsymbol{\sigma}^{\infty}\): remote uniform stress state; \(\varepsilon^{p}\): plastic strain from accumulated slip.
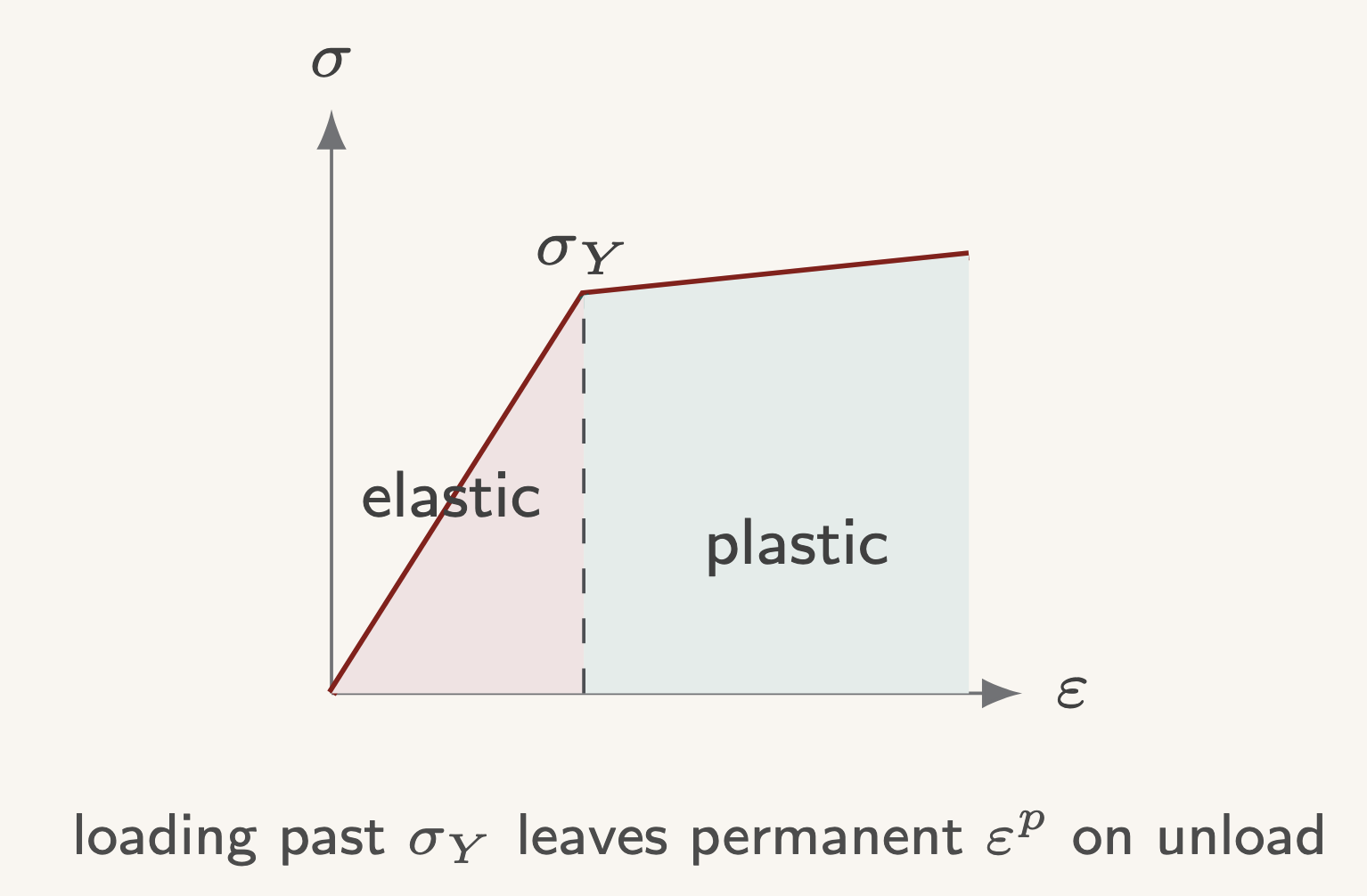
- Elastic: load removal \(\Rightarrow\) strain returns to zero.
- Plastic: permanent strain remains after unloading.
- Additive split (small strain): \[ \varepsilon_{ij}=\varepsilon_{ij}^{e}+\varepsilon_{ij}^{p}. \]
- Elastic part: \(\sigma_{ij} = C_{ijkl} \varepsilon^{e}_{kl}\).
- Plastic part: governed by a yield condition + flow rule.
Symbols: \(\varepsilon_{ij}^{e},\varepsilon_{ij}^{p}\): elastic / plastic strain parts; \(C_{ijkl}\): elastic stiffness (Hooke's law on \(\varepsilon^{e}\)).
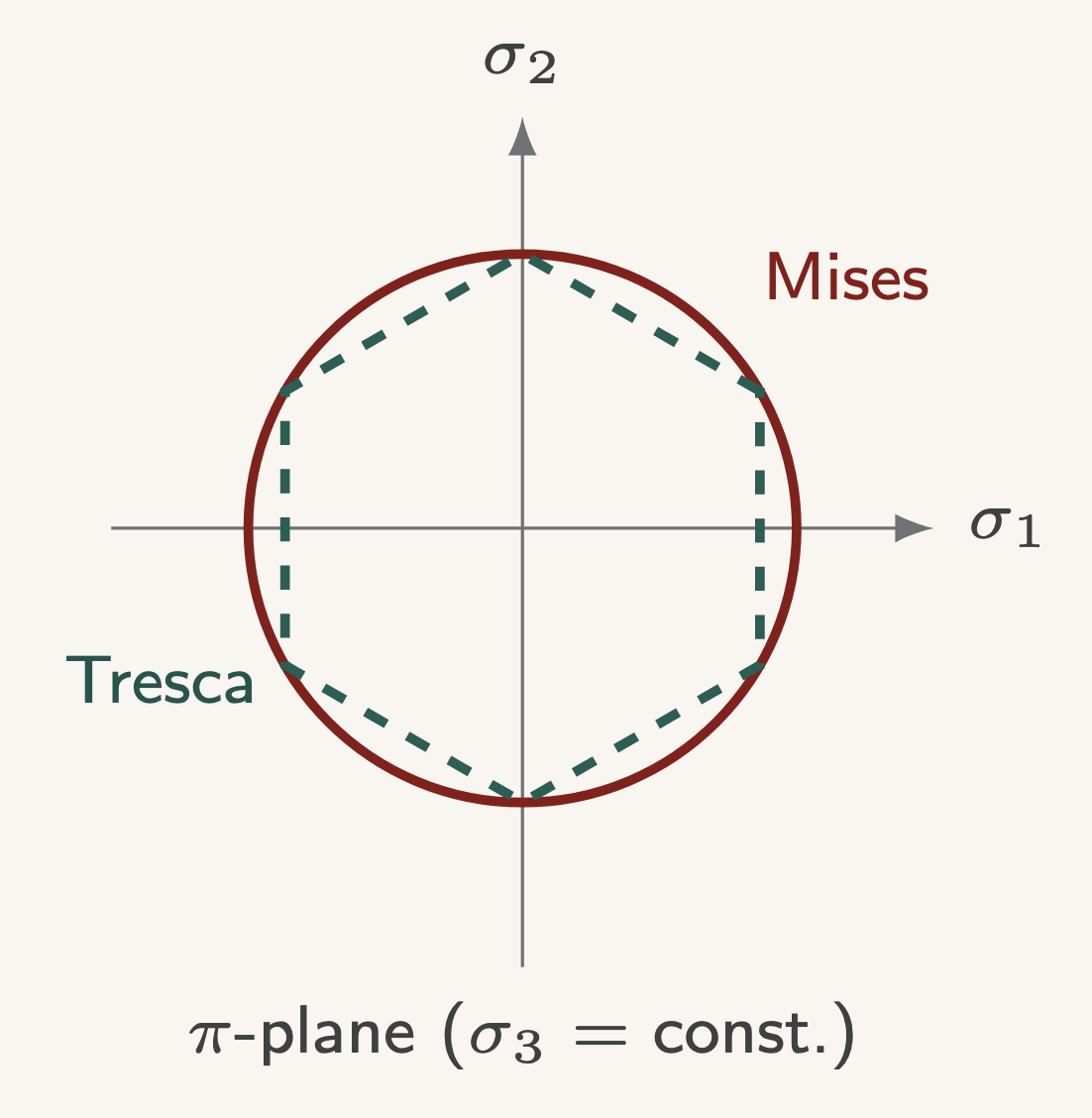
Principal stresses \(\sigma_1,\sigma_2,\sigma_3\): normal stresses on planes with no shear (\(\tau=0\)); eigenvalues of \(\sigma_{ij}\). Ordering: \(\sigma_1\ge\sigma_2\ge\sigma_3\).
Deviatoric stress \(s_{ij}=\sigma_{ij}-\tfrac{1}{3}\sigma_{kk}\delta_{ij}\); \(J_2=\tfrac{1}{2}s_{ij}s_{ij}\), \(\sigma_{\mathrm{eq}}=\sqrt{3J_2}\).
von Mises: \(f=J_2-k^2\le 0\), \(k=\sigma_{Y}/\sqrt{3}\).
Tresca: \(\max_{i,j}|\sigma_i-\sigma_j| = 2k\).
Symbols: \(\sigma_1,\sigma_2,\sigma_3\): principal stresses (eigenvalues of \(\sigma_{ij}\)); \(\sigma_{kk}\): mean / hydrostatic stress (\(\sigma_1+\sigma_2+\sigma_3\)); \(s_{ij}\): deviatoric stress; \(J_2\): second invariant of deviator; \(\sigma_{\mathrm{eq}}\): von Mises equivalent stress; \(f\): yield function (\(f\le 0\) admissible); \(k,\sigma_Y\): yield strength in shear / tension.
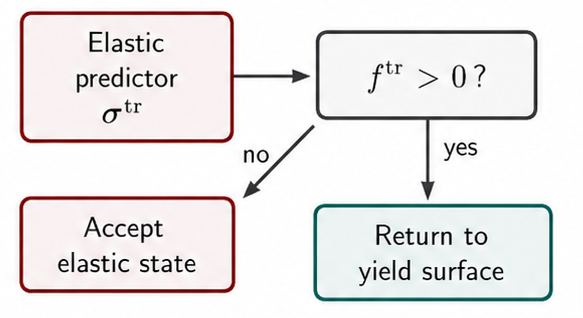
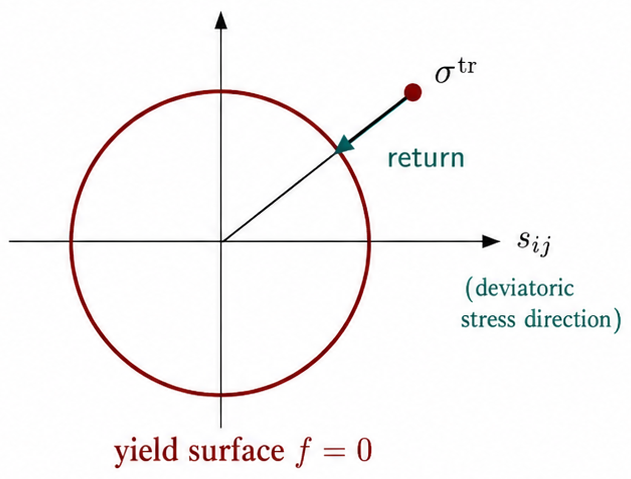
\[ \dot{\varepsilon}_{ij}^{p}=\dot{\lambda}\,\frac{\partial f}{\partial\sigma_{ij}}=\dot{\lambda}\, s_{ij},\qquad \dot{\varepsilon}_{kk}^{p}=0. \]
Elastic predictor \(\boldsymbol{\sigma}^{\mathrm{tr}}\); if \(f^{\mathrm{tr}} > 0\), return radially to \(f=0\).
Symbols: \(\dot{\varepsilon}_{ij}^{p}\): plastic strain rate; \(\dot{\lambda}\): plastic multiplier (consistency parameter); \(\boldsymbol{\sigma}^{\mathrm{tr}},f^{\mathrm{tr}}\): elastic trial stress / yield function; \(s_{ij}\): stress deviator (flow direction for \(J_2\) plasticity).
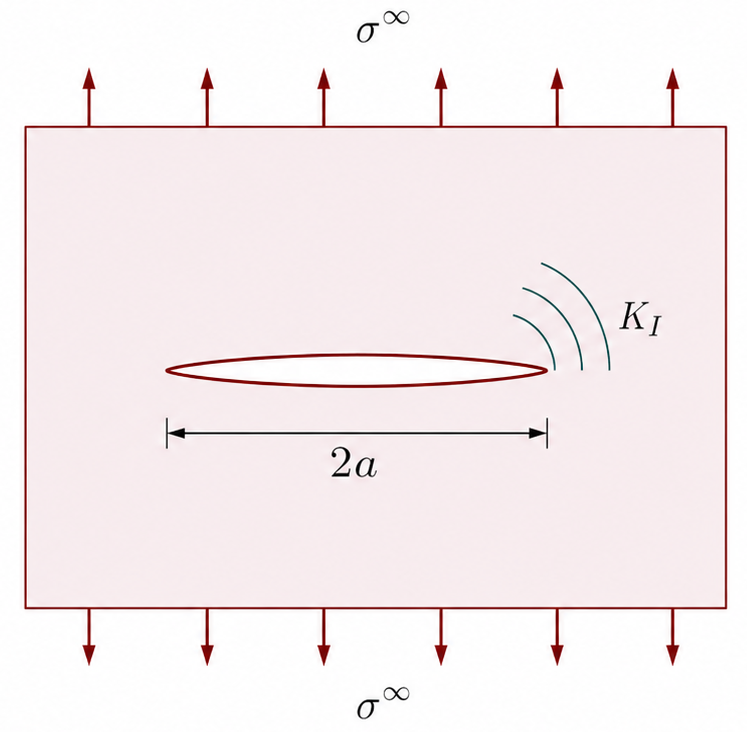
- Center crack \(2a\); remote \(\sigma^{\infty}\); tip field \(\sim r^{-1/2}\).
- \(K_{I}=\sigma^{\infty}\sqrt{\pi a}\) (infinite plate); fracture when \(K_{I}=K_{Ic}\).
- \(\mathcal{G}=\partial U/\partial a\); \(J\)-integral; fatigue (Part III).
Symbols: \(2a\): crack length; \(\sigma^{\infty}\): remote applied normal stress; \(r\): distance from crack tip; \(K_I\): mode-I stress intensity factor; \(K_{Ic}\): fracture toughness (critical \(K_I\)); \(\mathcal{G}\): energy release rate; \(J\): path-independent \(J\)-integral; \(U\): total potential / strain energy.
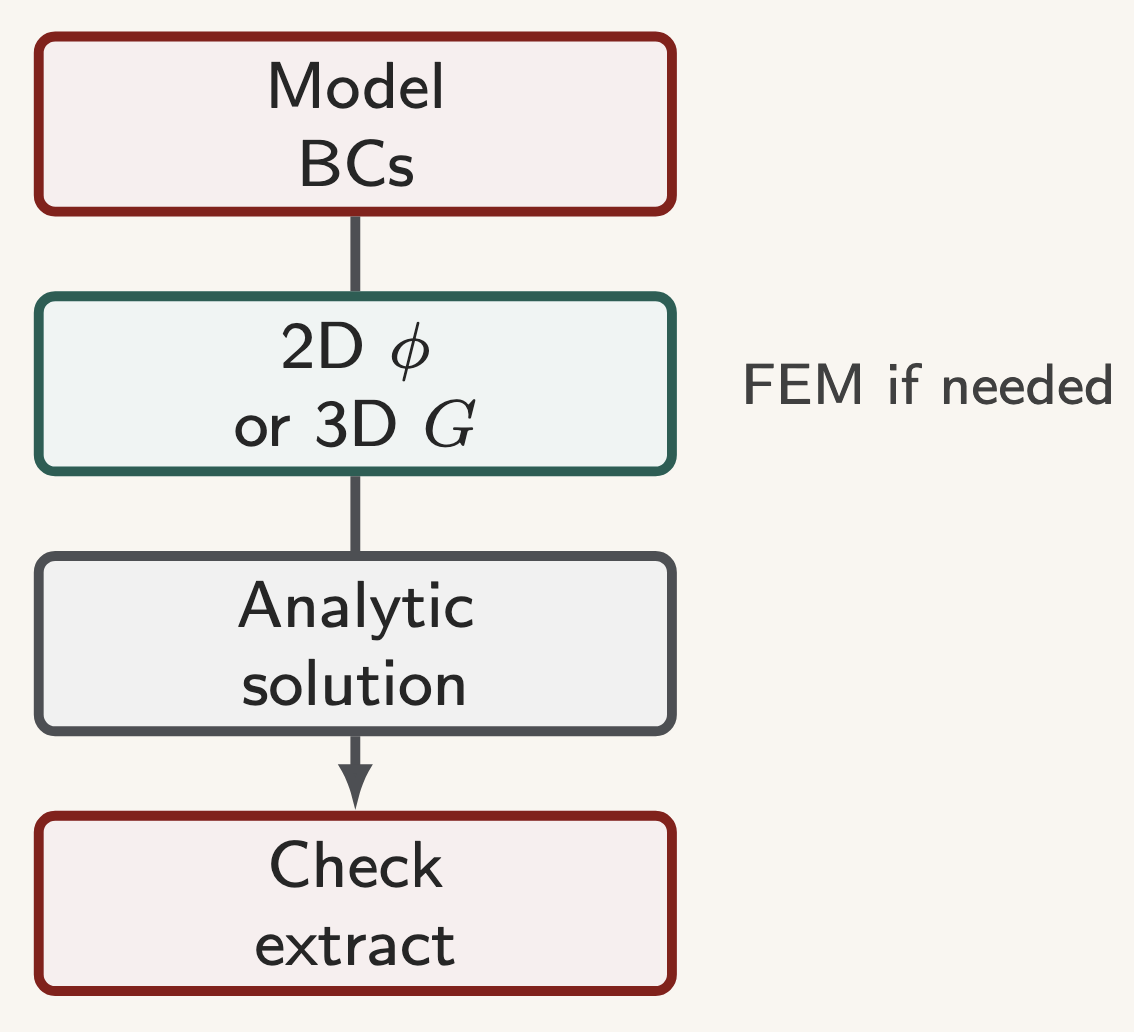
- Model: geometry, BCs, 2D vs. 3D.
- Method: Airy \(\phi\) or Green / images.
- Solve: separated variables, Fourier, multipoles.
- Check: equilibrium, BCs, finite energy.
- Extract: \(\sigma\), contact pressure, \(U\), forces.
Symbols: BCs: boundary conditions (\(S_u,S_t\)); \(\phi\): Airy stress function (2D); \(G\): Green's function (3D); \(\sigma\): stress tensor; \(U\): strain / potential energy.
Part I. Elasticity
- Introduction
- Tensors
- Hooke's Law
- Fundamental Equations
- 2D Elasticity
- Rectangular Beam
- Fourier Series and Transform
- Fourier Solution
- Half Space
- Contact
- Polar Coordinates
- Wedge and Notch
Part II. Plasticity
- 13. Fundamental Equations of Plasticity
- 14. Graphical Representations
- 15. Tension and Shear
- 16. Plastic Bending
- 18. Hardening Law
- 20. Crystal Plasticity
Part III. Fracture
- 22. Slit-like Crack
- 23. Energy Release Rate
- 24. Linear Elastic Fracture Mechanics
- 25. Elastic Plastic Fracture Mechanics
- 26. Fatigue
- Elasticity: kinematics + Hooke + equilibrium + BCs; 2D Airy \(\phi\), 3D Green's functions.
- Plasticity: \(\boldsymbol{\varepsilon} = \boldsymbol{\varepsilon}^{e} + \boldsymbol{\varepsilon}^{p}\); von Mises yield + associated \(J_2\) flow.
- Fracture: \(K_{I}\), \(\mathcal{G}\), and \(J\) link elastic fields to crack growth and fatigue.
- Matlab and analytic benchmarks support each part.
Symbols: \(\phi\): Airy function; \(\boldsymbol{\varepsilon}^{e,p}\): elastic / plastic strain; \(J_2\): second deviatoric invariant; \(K_I,\mathcal{G},J\): fracture parameters.
\(\sigma,\ \mathbf{u}\)
\(\varepsilon^{p},\ f=0\)
\(K_{I},\ J\)
- W. Cai, ME 340 Elasticity and Inelasticity (lecture notes); Course notes.
- J. R. Barber, Elasticity, 3rd ed., Springer (2010).
- T. L. Anderson, Fracture Mechanics, 3rd ed., Taylor & Francis (2005).
- Printable intro slides: ME340_Intro.pdf.
Thank you.